


事例(1) 樹脂成形品 外観検査装置(寸法・キズ検査 装置)
お客様の相談内容 |
|
| 樹脂成形品を受取、両端面、及び外周を画像処理による外観検査する装置(マシンビジョン)を提案して欲しい。 | |
提案内容 |
|||
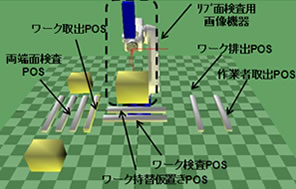
| 成型機R/L各1Setの状態で排出された樹脂成形品を受取、両端面、及び外周(リブ面含め)各4面を検査する外観装置(マシンビジョン)を提案した。 | |||
必要とする具備機構 |
|||
設備条件
|
|||
シュミレーション結果 |
|||
実測ロボットサイクルタイム:約21.5sec |
|||
画像処理入力時間:0.1secx4面x16箇所=6.4sec ワーク回転動作(ロボット):0.3secx3面x16箇所=14.4sec |
|||
| 上記合計サイクルタイム 42.3sec /ヶ(約45sec) | |||
|
|||