

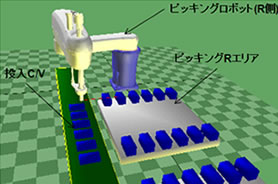
事例(1) PETボトルピッキング装置 (位置決め装置)
お客様の相談内容 |
|
| PETボトルのピッキングと、向きを識別できるようなマシンビジョンピッキング装置(設備)を提案して欲しい。 | |
提案内容 |
|
| 袋詰めされたPETボトルを作業者によりステージに任意に排出し、排出されたPETボトルの向きを認識・取出を行いコンベアへ投入する装置(設備)を提案した。 | |
必要とする具備機構 |
|
設備条件 |
|||
|
|||
設備条件 |
|||||||
|
|||||||
|
|||||||
|
|

お客様の相談内容 |
|
| PETボトルのピッキングと、向きを識別できるようなマシンビジョンピッキング装置(設備)を提案して欲しい。 | |
提案内容 |
|
| 袋詰めされたPETボトルを作業者によりステージに任意に排出し、排出されたPETボトルの向きを認識・取出を行いコンベアへ投入する装置(設備)を提案した。 | |
必要とする具備機構 |
|
設備条件 |
|||
|
|||
設備条件 |
|||||||
|
|||||||
|
|||||||
|
|